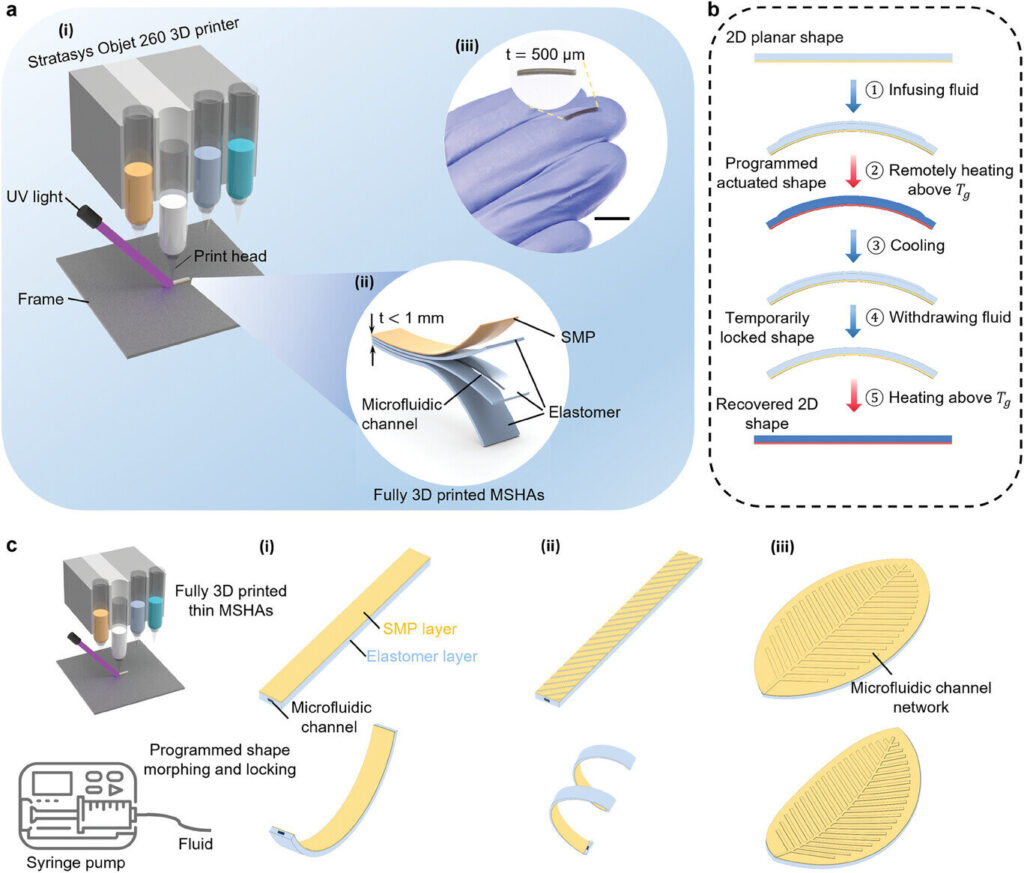
Illustrations schématiques de l'actionneur hydraulique souple (MSHA) miniature d'une épaisseur inférieure au millimètre, entièrement imprimé en 3D, intégré au SME pour le morphing et le verrouillage de forme. Crédit: Matériaux avancés (2024). DOI : 10.1002/adma.202402517
Des chercheurs de l'Université d'État de Caroline du Nord ont démontré des actionneurs hydrauliques souples miniatures pouvant être utilisés pour contrôler la déformation et le mouvement de robots souples de moins d'un millimètre d'épaisseur. Les chercheurs ont également démontré que cette technique fonctionne avec des matériaux à mémoire de forme, permettant aux utilisateurs de verrouiller à plusieurs reprises les robots mous dans la forme souhaitée et de revenir à la forme originale si nécessaire.
“La robotique douce est prometteuse pour de nombreuses applications, mais il est difficile de concevoir les actionneurs qui pilotent le mouvement des robots mous à petite échelle”, déclare Jie Yin, auteur correspondant d'un article sur ces travaux et professeur agrégé de mécanique et d'aérospatiale. ingénierie à NC State.
“Notre approche utilise des technologies d'impression 3D multi-matériaux disponibles dans le commerce et des polymères à mémoire de forme pour créer des actionneurs souples à l'échelle microscopique qui nous permettent de contrôler de très petits robots mous, ce qui permet un contrôle et une délicatesse exceptionnels.”
La nouvelle technique repose sur la création de robots souples composés de deux couches. La première couche est un polymère flexible créé à l’aide de technologies d’impression 3D et intègre un motif de canaux microfluidiques, essentiellement de très petits tubes traversant le matériau. La deuxième couche est un polymère flexible à mémoire de forme. Au total, le robot souple ne fait que 0,8 millimètre d’épaisseur.
En pompant du fluide dans les canaux microfluidiques, les utilisateurs créent une pression hydraulique qui force le robot souple à bouger et à changer de forme. La configuration des canaux microfluidiques contrôle le mouvement et le changement de forme du robot logiciel, qu'il se plie, se torde, etc. De plus, la quantité de fluide introduite et la rapidité avec laquelle elle est introduite contrôlent la rapidité avec laquelle le robot logiciel se déplace et la quantité de force qu'il exerce.
Si les utilisateurs souhaitent « geler » la forme du robot souple, ils peuvent appliquer une chaleur modérée (64°C ou 147°F), puis laisser le robot refroidir brièvement. Cela empêche le robot logiciel de reprendre sa forme originale, même après que le liquide contenu dans les canaux microfluidiques ait été pompé. Si les utilisateurs souhaitent redonner au robot souple sa forme d'origine, il leur suffit d'appliquer à nouveau la chaleur après avoir pompé le liquide, et le robot se détend et reprend sa configuration d'origine.
“Un facteur clé ici est d'affiner l'épaisseur de la couche à mémoire de forme par rapport à la couche qui contient les canaux microfluidiques”, explique Yinding Chi, co-auteur principal de l'article et ancien doctorant. étudiant à NC State. “Vous avez besoin que la couche à mémoire de forme soit suffisamment fine pour se plier lorsque la pression de l'actionneur est appliquée, mais suffisamment épaisse pour que le robot souple conserve sa forme même après la suppression de la pression.”
Pour démontrer la technique, les chercheurs ont créé un robot souple « pince », capable de ramasser de petits objets. Les chercheurs ont appliqué une pression hydraulique, provoquant le pincement de la pince sur un objet. En appliquant de la chaleur, les chercheurs ont pu fixer la pince dans sa position « fermée », même après avoir relâché la pression de l'actionneur hydraulique.
Les actionneurs hydrauliques souples miniatures peuvent contrôler la déformation et le mouvement de robots souples de moins d’un millimètre d’épaisseur. Cette photo montre un robot mou en forme de vrille s’enroulant autour d’un cylindre et le soulevant. Crédit : Jie Yin, Université d’État de Caroline du Nord
La pince pouvait alors être déplacée (transportant l'objet qu'elle tenait) dans une nouvelle position. Les chercheurs ont ensuite appliqué à nouveau de la chaleur, ce qui a permis à la pince de libérer l'objet qu'elle avait ramassé.
“Comme ces robots mous sont si fins, nous pouvons les chauffer jusqu'à 64 °C rapidement et facilement à l'aide d'une petite source de lumière infrarouge. Ils refroidissent également très rapidement”, explique Haitao Qing, co-auteur principal de l'article et titulaire d'un doctorat. . étudiant à NC State. “Cette série d'opérations ne prend donc que deux minutes environ.
“Et le mouvement ne doit pas nécessairement être une pince qui pince”, explique Qing. “Nous avons également présenté une pince inspirée des vignes dans la nature. Ces pinces s'enroulent rapidement autour d'un objet et le serrent fermement, permettant une prise sûre.
“Cet article sert de preuve de concept pour cette nouvelle technique, et nous sommes enthousiasmés par les applications potentielles de cette classe d'actionneurs souples miniatures dans les robots mous à petite échelle, les machines de changement de forme et l'ingénierie biomédicale.”
L'article intitulé « Actionneurs hydrauliques souples miniatures entièrement imprimés en 3D avec effet de mémoire de forme pour le morphing et la manipulation » est publié dans la revue Matériaux avancés. L'article a été co-écrit par Yaoye Hong, ancien doctorant. étudiant à NC State; Yao Zhao et Yanbin Li, chercheurs postdoctoraux à NC State ; et Fangjie Qi, titulaire d'un doctorat. étudiant à NC State.
Plus d'information:
Haitao Qing et al, Actionneurs hydrauliques souples miniatures entièrement imprimés en 3D avec effet de mémoire de forme pour le morphing et la manipulation, Matériaux avancés (2024). DOI : 10.1002/adma.202402517
Fourni par l'Université d'État de Caroline du Nord
Citation: Les mini-actionneurs imprimés en 3D peuvent déplacer de petits robots mous, les verrouiller dans de nouvelles formes (2024, 11 juin) récupéré le 11 juin 2024 sur
Ce document est soumis au droit d'auteur. En dehors de toute utilisation équitable à des fins d'étude ou de recherche privée, aucune partie ne peut être reproduite sans autorisation écrite. Le contenu est fourni seulement pour information.